
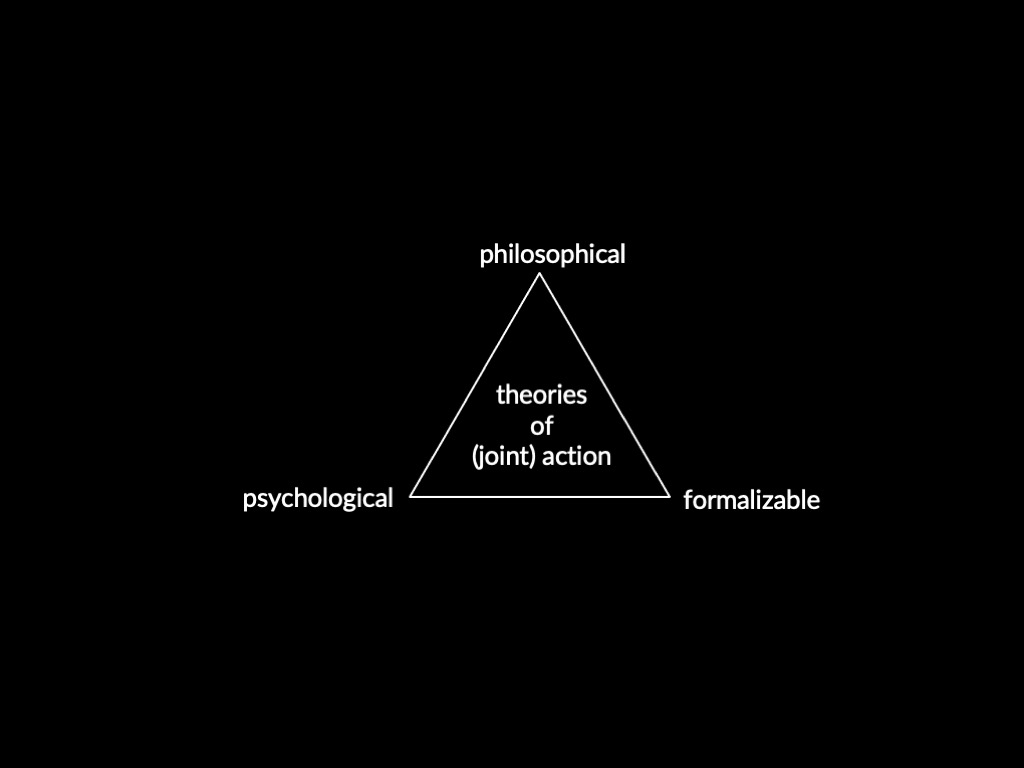
We tried to gain some experience in combining each pair
in order to get a deeper understanding of (joint) action.
Bratman offers a counterexample to something related to the Simple View (Bratman, 1992, p. see][); (Bratman, 2014, p. see][).
Suppose that you and I each intend that we, you and I, go to New York together.
But your plan is to point a gun at me and bundle me into the boot (or trunk) of your
car.
Then you intend that we go to New York together, but in a way that doesn't
depend on my intentions. As you see things, I'm going to New York with you whether
I like it or not. Does this provide the basis for an objection to the Simple View?
Bratman’s ‘mafia case’
Michael Bratman offers a counterexample to something related to the Simple View.
Suppose that you and I each intend that we, you and I, go to New York together.
But your plan is to point a gun at me and bundle me into the boot (or trunk) of your
car.
Then you intend that we go to New York together, but in a way that doesn't
depend on my intentions. As you see things, I'm going to New York with you whether
I like it or not. This doesn't seem like the basis for shared agency.
After all, your plan involves me being abducted.
But it is still a case in which we each intend that we go to New York together and we do.
So, apparently, the conditions of the Simple View are met (or almost met) and yet there is
no shared agency.
BRATMAN's DIAGNOSIS - have to intend to do it by way of the other’s intentions.
This is what is wrong in mafia case.
Shared agency means connecting with each other as agents, not merely as bodies
Bratman’s brilliant idea for avoiding this sort of problem is to suggest that we don’t just each intend the action but rather we each intend to act by way of the other's intentions.
We can put this by saying that our intentions must interlock: mine specify yours and yours mind.
Now this appeal to interlocking intentions enables Bratman to avoid counterexamples like the Tarantino walkers; if I intend that we walk by way of your intention that we walk, I suppose can't rationally also point a gun at you and coerce you to walk.
‘each agent does not just intend that the group perform the […] joint action.
‘Rather, each agent intends as well that the group perform this joint action in accordance with subplans (of the intentions in favor of the joint action) that mesh’
(Bratman 1992: 332)
`each agent does not just intend that the group perform the […] joint action. Rather, each agent intends as well that the group perform this joint action in accordance with subplans (of the intentions in favor of the joint action) that mesh' (Bratman, 1992, p. \ 332).
Our plans are _interconnected_ just if facts about your plans feature in mine and conversely.
‘shared intentional [i.e.\ collective] agency consists, at bottom, in interconnected planning agency of the participants’ (Bratman, 2011).

Here is an example of two people who have an unshared intention.
Ayesha and Ahmed. They can each tilt the table, but only along one axis.
(Note that Ayesha can unilaterally intend that they, Ayesha and Ahmed, make the ball hit the red square.)
Ayesha and Ahmed meet the conditions for unshared intention concerning hitting the
blue cross and hitting the red square. And their actions are appropriately related
to their intentions.
Ayesha and Ahmed are not acting as one (or exercising shared agency). This is not just
a matter of their having different intentions, I think. More fundamentally,
each sees the other’s intentions merely as constraints to work around or
opportunities to exploit. While I don’t think that viewing another’s intentions
in this way is entirely incompatible with acting as one, in Ayesha and Ahmed’s case
each views the other’s intentions *merely* as opportunities to exploit or constraints
to work around. And this is, surely, incompatible with acting as one. (*Qualified in the
book chapter for Catrin Misselhorn.)
If you think Ayesha and Ahmed are having a bad hair day, you should see Beatrice and Baldric ...

Now explain that Ayesha and Ahmed have an unshared intention, but Beatrice and Baldric have a shared intention.
I claim that Beatrice and Baldric have a shared intention that they J$_1$
only if
Ayesha and Ahmed have a shared intention.
This claim follows from the similarities of the two cases.
The only difference is that Beatrice and Baldric happen to have same task, whereas Ayesha and Ahmed have different tasks.
But neither Beatrice nor Baldric makes use of the fact that they have the same task.
So if we consider how
Beatrice and Baldric's case
differs from
Ayesha and Ahmed’s,
we can see that these differences do not plausibly amount to a difference with respect to shared agency.
Shared intention cannot feature in one case but not the other.
So I take this case to be an objection to the idea that we can explain acting as one
by appeal to shared intention if we also accept Bratman's claims about what is
sufficient for shared intention.
THE GIST: One feature of Bratman’s account is that you can be engaging in a joint action even if
you merely see the other’s intentions as opportunities to exploit and constraints to work around.
As long as you know about, and go along with, the other’s intentions, there is
joint action.
Many, like Gilbert find this unacceptable
Brand, 1984

conclusion
In conclusion, ...

common goal
A common goal is is a single goal to which the
agents’ actions are directed.
[Can illustrate common vs collective goal with current political situation in
which the actions of bitter rivals may have a common goal but no collective goal
(unlike the political allies).]
This is still not enough. To see why, suppose that
the strangers’ actions are no longer coordinated and they are walking
different routes to their gate, but that
each stranger is concerned that
the Marseille flight should leave on time. As each sees it, the only thing she can
do to this end is to walk to the gate. Her actions are therefore directed to the
same goal as the other’s: to ensure the Marseille flight leaves on time.
So there is one goal to which each of their actions are directed; that is, a common
goal. I suspect we still haven’t captured what talk of a ‘we mode’ aims at.

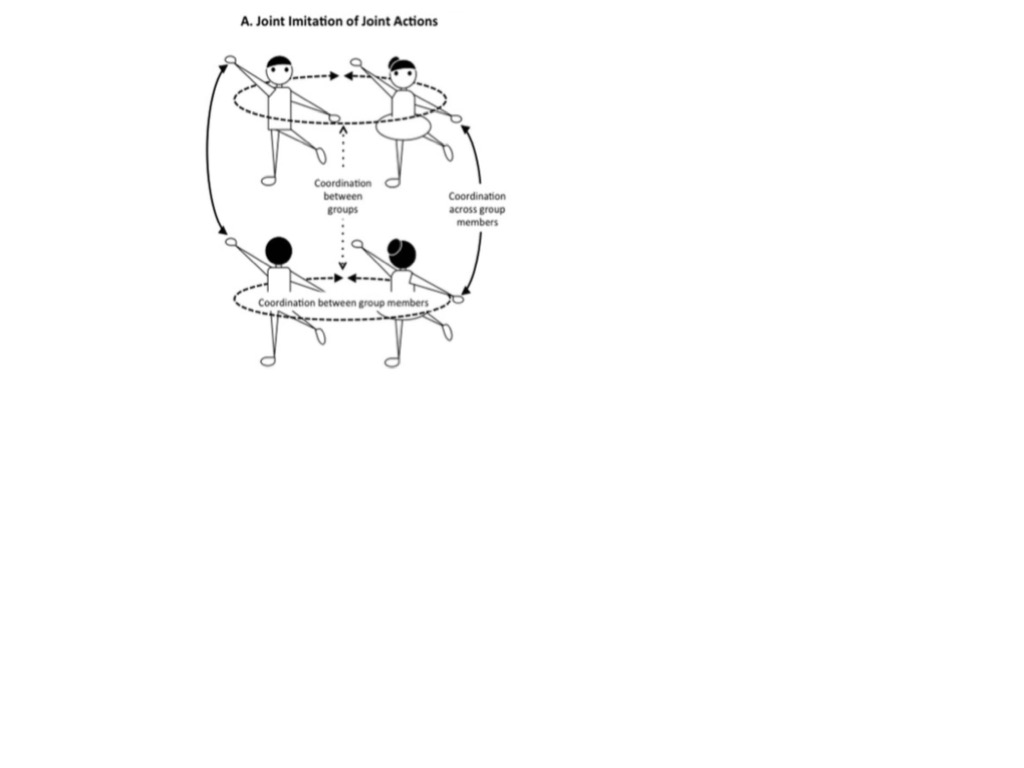
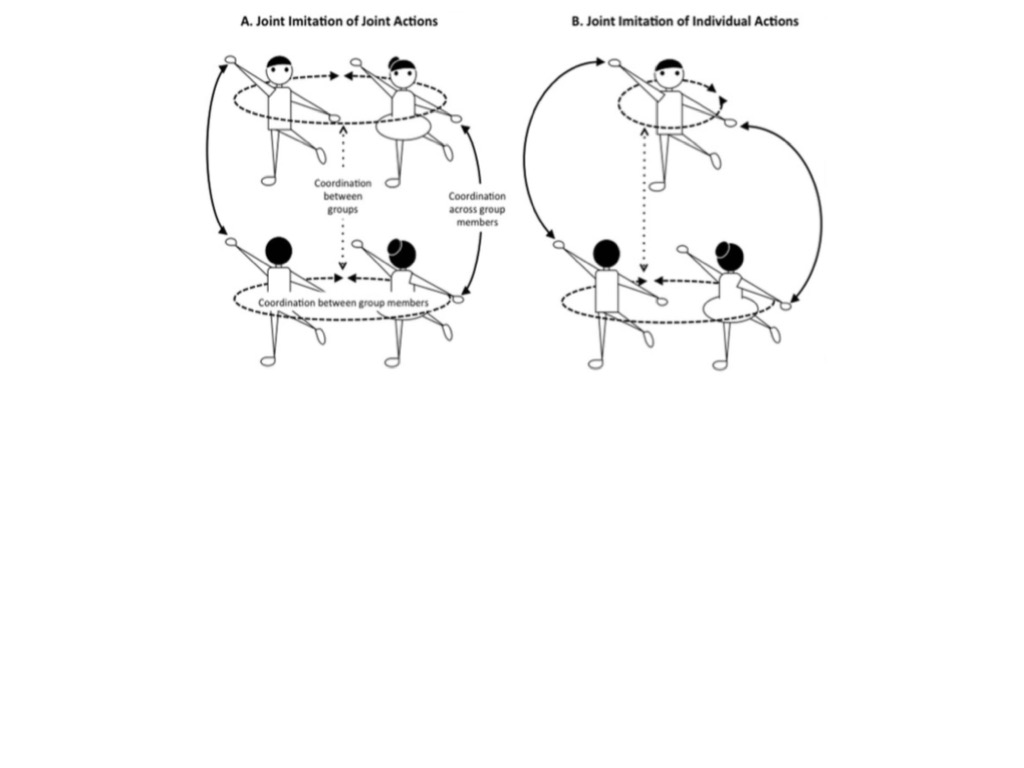
Kourtis et al, 2012
Kourtis et al, 2012
Kourtis et al, 2012
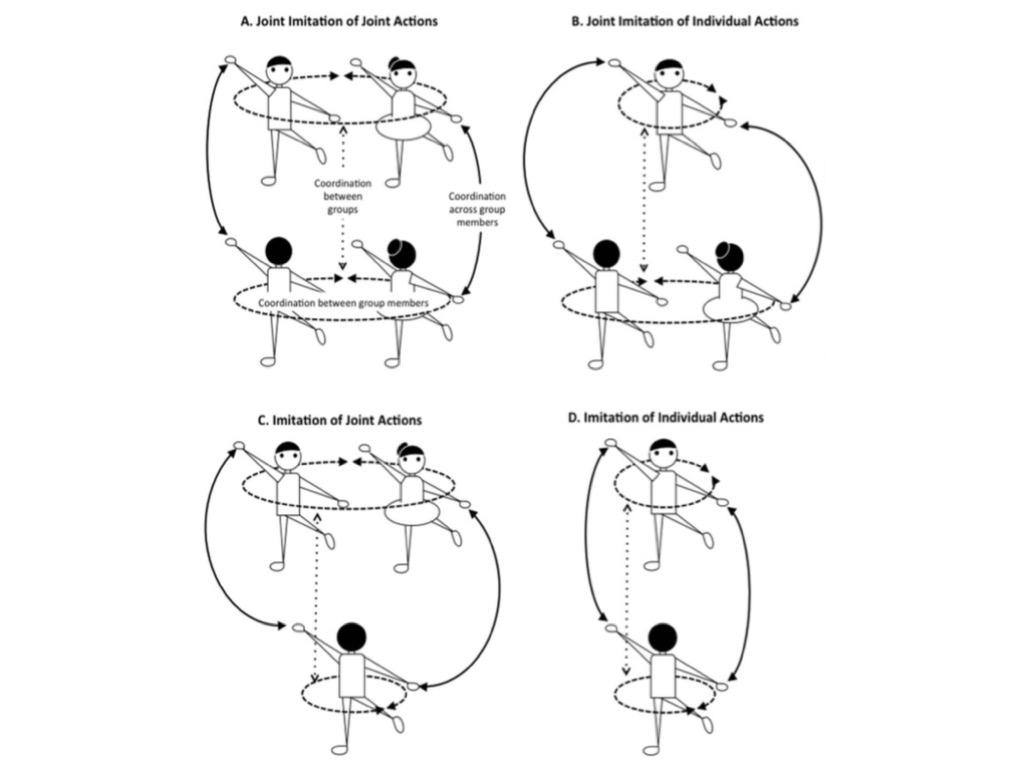
Kourtis et al (2014, figure 1c)
I think we're a long way from having a large body of converging evidence for this conjecture,
but there is some that points in this direction.
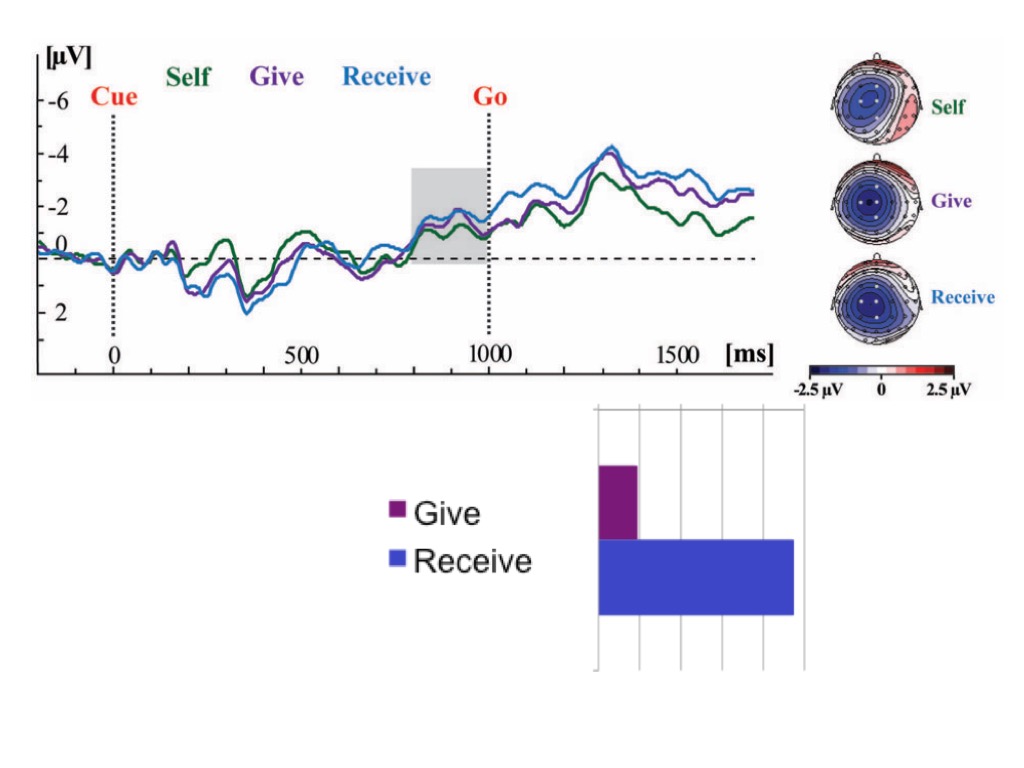
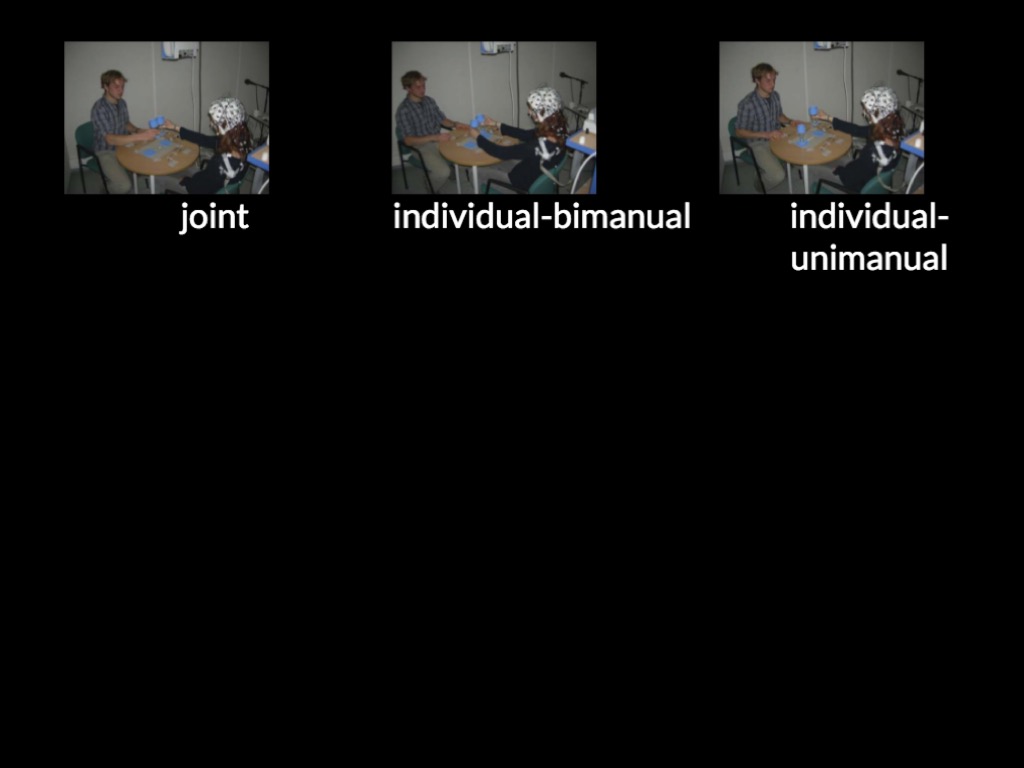
One of the most relevant experiments is this one by Kourtis, Knoblich, Woźniak, & Sebanz (2014).
They contrasted a simple joint action involving two agents clinking glasses.
The CNV is a signal of motor preparation for action which is time-locked to action onset.
In previous research, Kourtis et al show (i) that the CNV occurs when joint action
partners act, suggesting that when acting together we represent others' actions motorically
as well as our own \cite{kourtis:2012_predictive};
and
(ii) (roughly) a stronger CNV occurs in relation to actions of others one is engaged in joint action than
in relation to actions of others one is merely observing \cite{kourtis:2010_favoritism}.
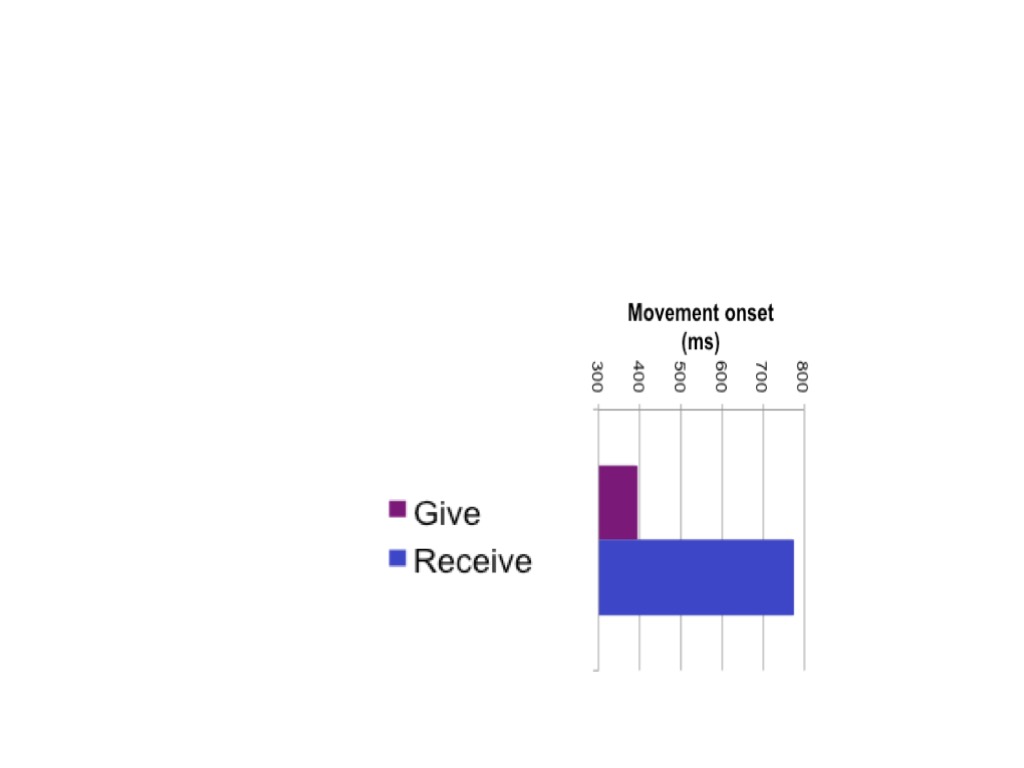
Kourtis et al hypothesised that in actions like clinking glasses,
A single outcome represented is motorically,
which triggers planning-like processes
concerning all the agents' actions.
This leads to the prediction that the CNV in joint action will resemble that occurring in
bimanual action more than that occuring in unimanual action.
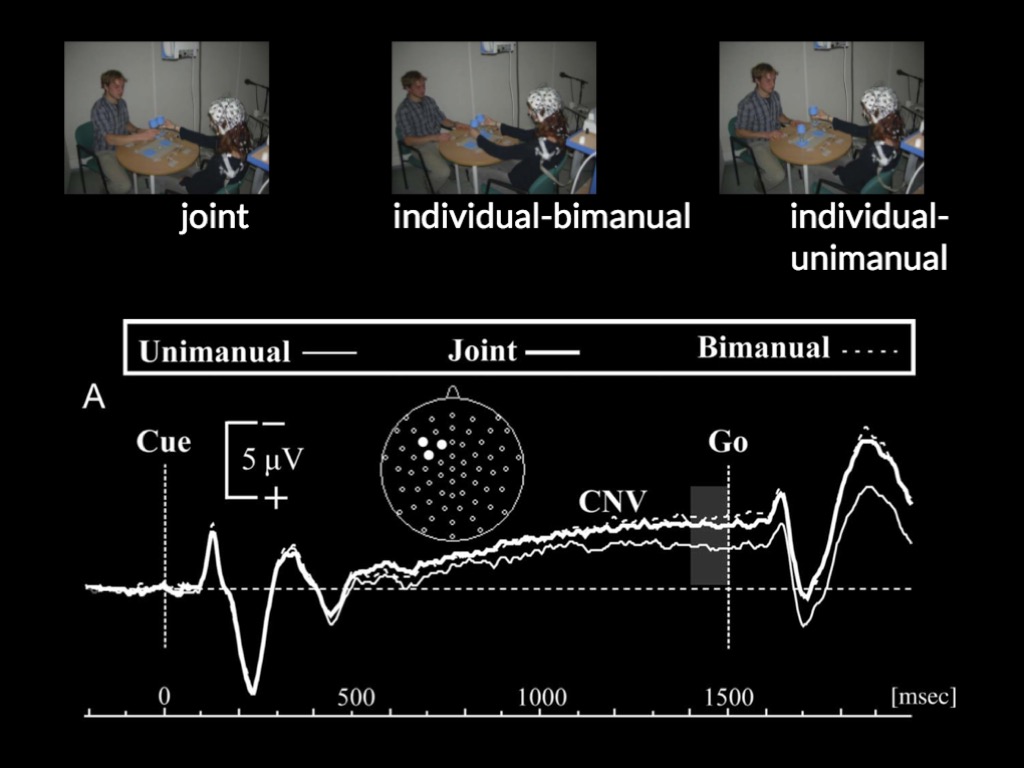
Kourtis et al (2014, figure 4a)
... and this is exactly what they found.
Ramenzoni et al, 2014 figure 1
Importantly there is converging evidence for the involvement of motor representation concerning
a partner’s action in joint action from studies which use behavioural measures ...
Joint performance is better when observing joint actors; individual performance when observing
individual actors.
Ramenzoni et al, 2014 figure 1
Ramenzoni et al, 2014 figure 1
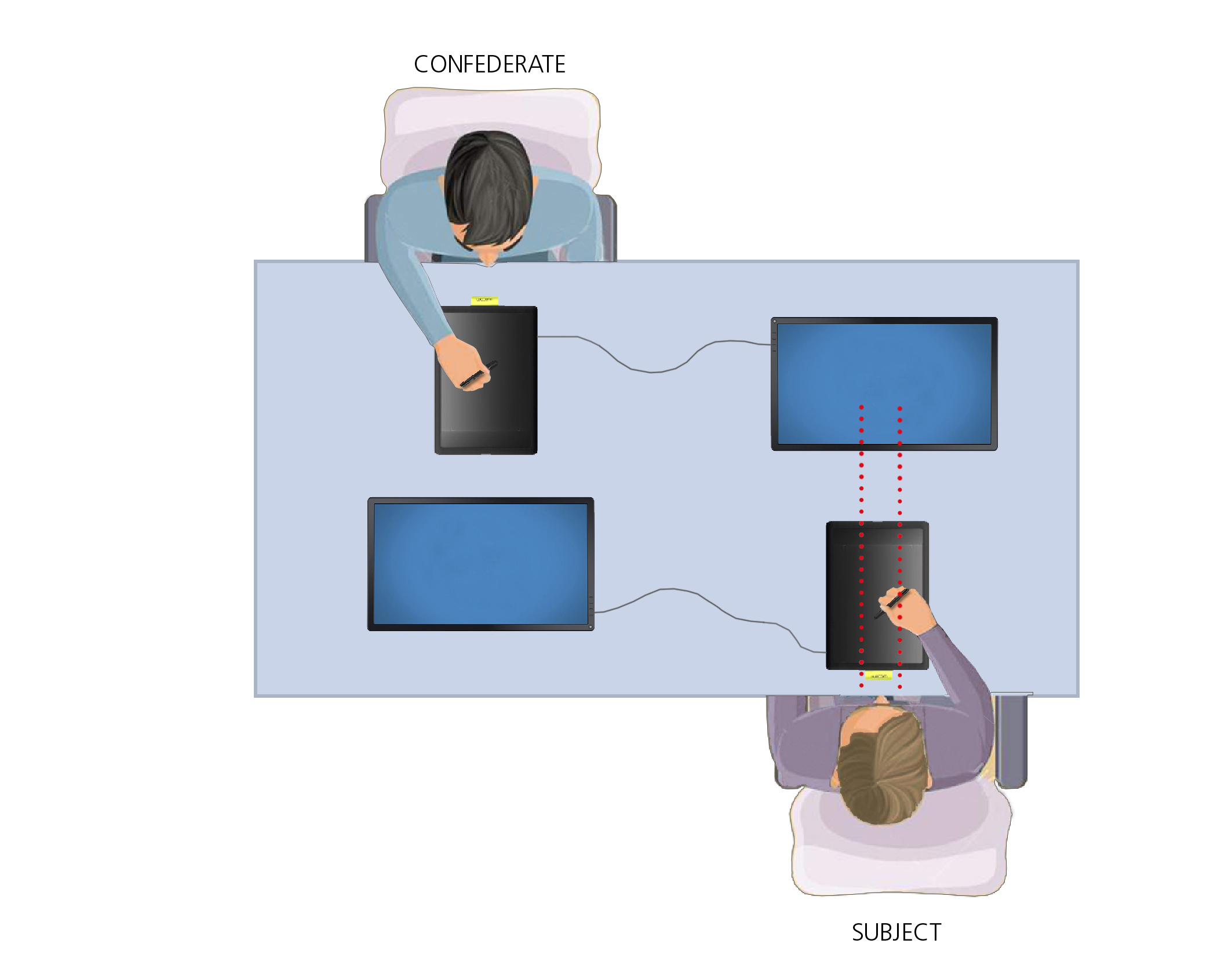
della Gatta et al, ‘Drawn Together’ Cognition 2017
So once again we are forced to ask,
What are those motor representations doing here?
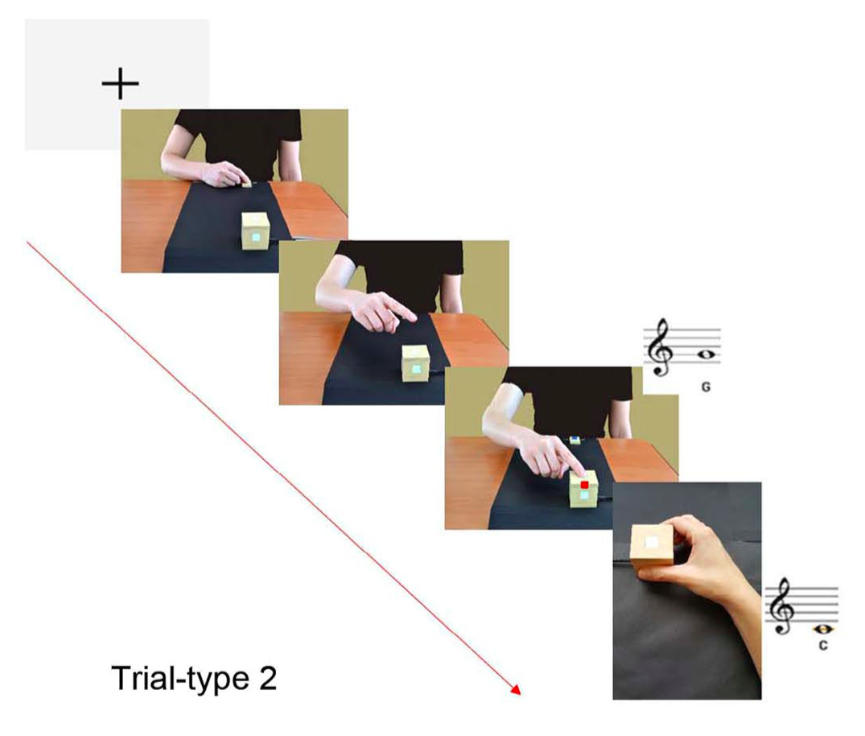
Sacheli et al, 2018 figure 2 (part)
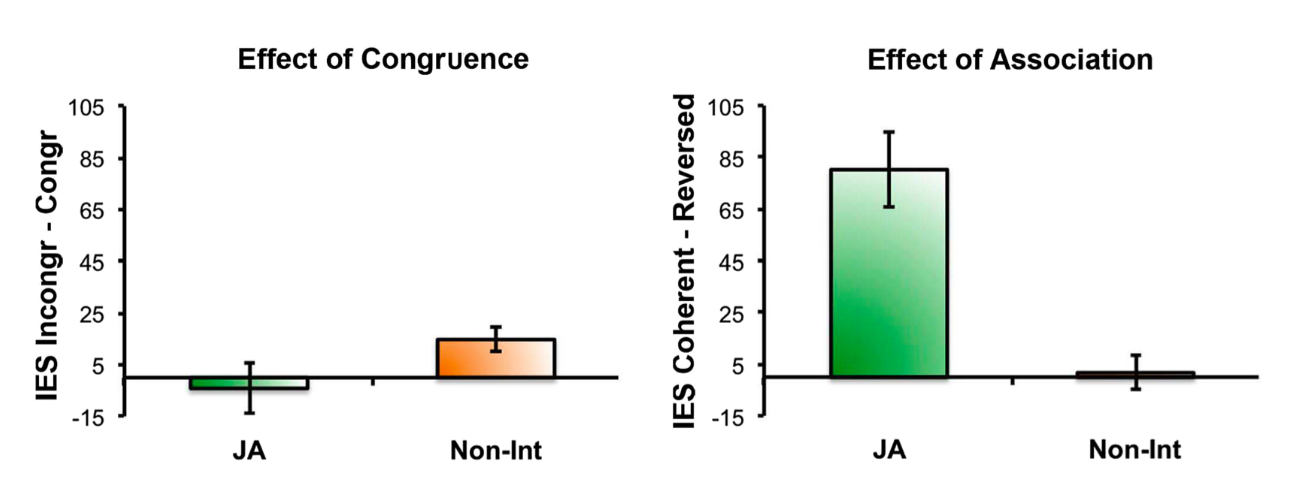
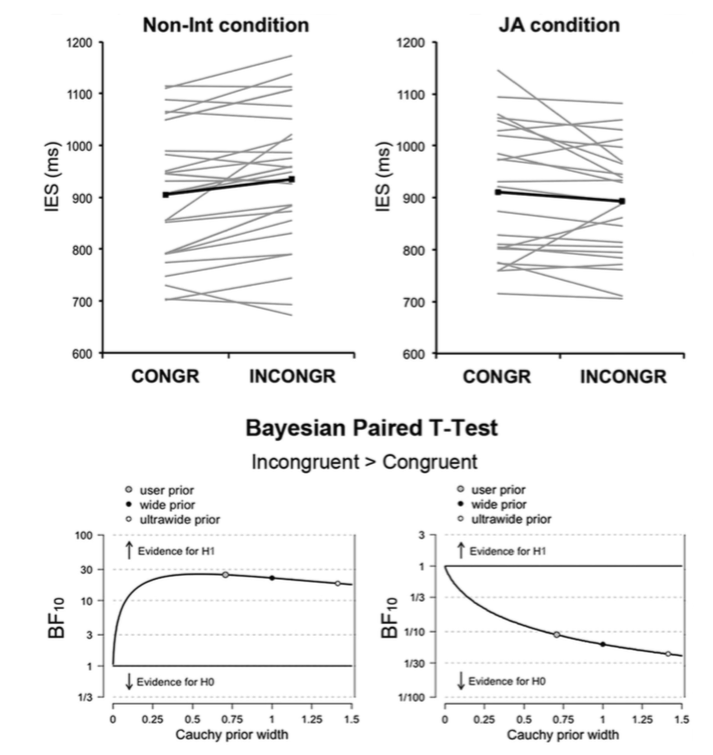
Sacheli et al, 2018 figure 5
[Skip -- just in case anyone asks]
Sacheli et al, 2018 figure 3
Let me start by stepping back and consider an individual action.
An agent moves a mug from one place to another, passing in from her left hand to her right hand half way [*demonstrate].
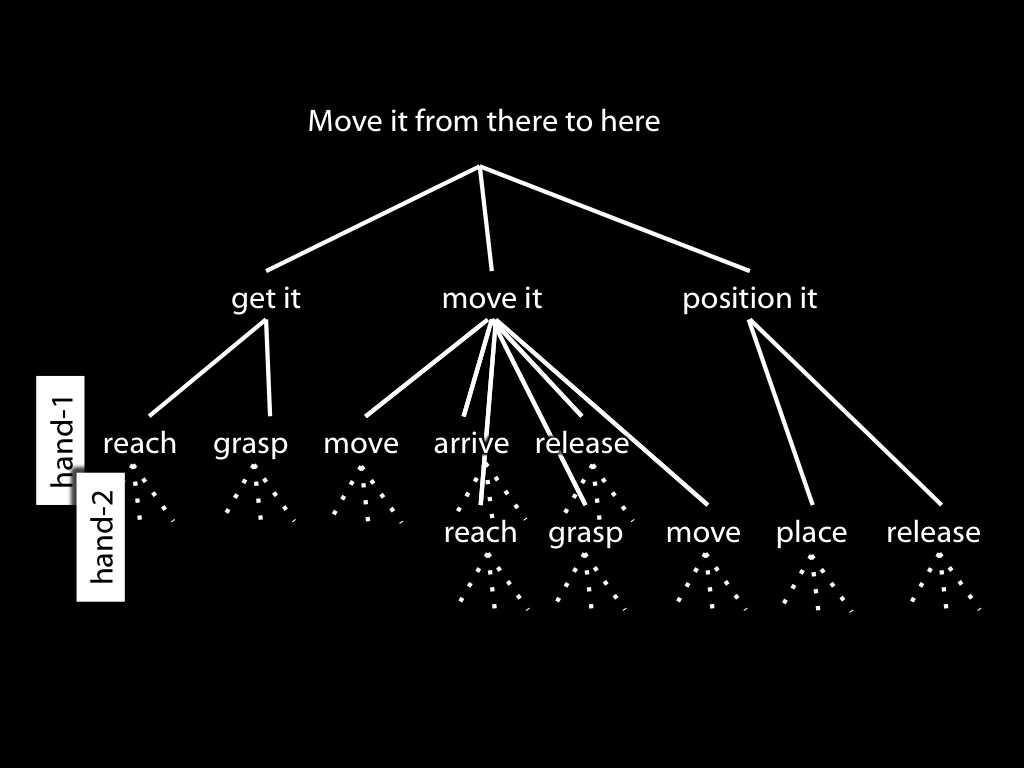
It’s a familiar idea that motor representations of outcomes resemble intentions in that they can trigger processes which are like planning in some respects.
These processes are like planning in that they involve starting with representations of relatively distal outcomes and gradually filling in details, resulting in a structure of motor representations that can be hierarchically arranged by the means-end relation (Bekkering, Wohlschlager, & Gattis, 2000; Grafton & Hamilton, 2007).
Processes triggered by motor representations of outcomes are also planning-like in that they involve selecting means for actions to be performed now in ways that anticipate future actions (Jeannerod, 2006; Zhang & Rosenbaum, 2007; Rosenbaum, Chapman, Weigelt, Weiss, & Wel, 2012).
Now in this action of moving a mug, there is a need, even for the single agent, to coordinate the exchange between her two hands.
(If her action is fluid,
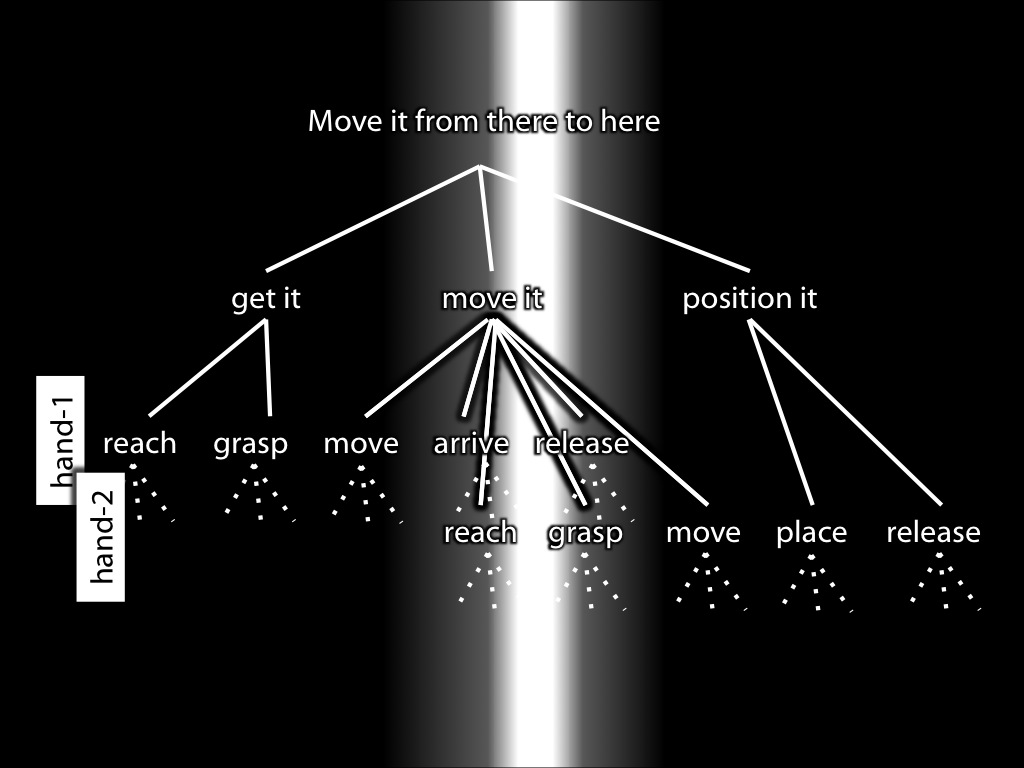
she may proactively adjust her left hand in advance of the mug’s being lifted by her right hand (Novembre, Ticini, Schütz-Bosbach, & Keller, 2012, p. compare][]{diedrichsen:2003_anticipatory,hugon:1982_anticipatory, lum:1992_feedforward}.) .notes How could such tight coordination be achieved? .notes Part of the answer involves the fact that motor representations and processes concerning the actions involving each hand are not entirely independent of each other. .notes Rather there is a plan-like structure of motor representation for the whole action and motor representations concerning actions involving each hand are components of this larger plan-structure. .notes It is in part because they are components of a larger plan-structure that the movements of one hand constrain and are constrained by the movements of the other hand. .slide +blur('img:eq(0)’) .notes But how is any of this relevant to the case of joint action? +slide({bkg:’motor_representation_in_joint_action/slide_40.jpg’}) .notes Earlier we considered what is involved in performing an ordinary, individual action, where an agent moves a mug from one place to another passing it between her hands half-way.notes Compare this individual action with the same action performed by two agents as a joint action. .notes One agent takes the mug and passes it to the other, who then places it. .notes The joint action is like the individual action in several respects. .notes First, the goal to which the joint action is directed is the same, namely to move the mug from here to there. +slide({bkg:’motor_representation_in_joint_action/slide_41.jpg’}) .notes Second, there is a similar coordination problem---agents’ two hands have to meet. +slide({bkg:’motor_representation_in_joint_action/slide_42.jpg’}) .notes And, third, evidence we have mentioned suggests that in joint action, motor representations and processes occur in each agent much like those that would occur if this agent were performing the whole action alone. .notes Why would this be helpful? .notes .notes Suppose the agents’ planning-like motor processes are similar enough that, in this context, they will reliably produce approximately the same plan-like structures of motor representations. .notes Then having a single planning-motor process for the whole joint action in each agent means that .notes 1. in each agent there is a plan-structure of motor representations concerning each of the others’ actions, .notes 1. each agent’s plan-structure concerning another’s actions is approximately the same as any other agent’s plan-structure concerning those actions, .notes 1. each agent’s plan-structure concerning her own actions is constrained by her plan-structures concerning the other’s actions. .notes \ .notes So each agent’s plan-structure of motor representations concerning her own actions is indirectly constrained by the other agents’ plan-structures concerning their own actions .notes by virtue of being directly constrained by her plan-structures concerning their actions. .notes In this way it is possible to use ordinary planning-motor processes to achieve coordination in joint action. .notes What enables the two or more agents’ plan-structures of motor representations to mesh is not that they represent each other’s plans but that they processes motorically each other’s actions and their own as parts of a single action. .notes .notes So how does the joint action differ from the corresponding individual action? .notes There are at least two differences. .notes First, we now have two plan-like structures of motor representations because in each agent there is a planning-motor process concerning the whole action. .notes These two structures of motor representations have to be identical or similar enough that the differences don’t matter for the coordination of the agents’ actions---let us abbreviate this by saying that they have to _match_. .notes The need for matching planning-like structures is not specific to joint action; .notes it is also required where one agent observing another is able to predict her actions thanks to planning-motor processes concerning the other’s actions (we mentioned evidence that this occurs above). +slide_middle({bkg:’motor_representation_in_joint_action/slide_43.jpg’}) .notes A second difference between the joint action and the individual action is this. .notes In joint action there are planning-like motor processes in each agent concerning some actions which she will not eventually perform. .notes There must therefore be something that prevents part but not all of the planning-motor process leading all the way to action. .notes Exactly how this selective prevention works is an open question. .notes We expect bodily and environmental constraints are often relevant. .notes There may also be differences in how others’ actions are processed motorically \citep[compare][).
\footnote{(Novembre et al., 2012, p. \ 2901): 'in the context of a joint action—the motor control system is particularly sensitive to the identity of the agent (self or other) of a represented action and that (social) contextual information is one means for achieving this distinction'}
And inhibition could be involved too (Sebanz, Knoblich, Prinz, & Wascher, 2006, p. compare][).
My proposal, then, is this.
In both practical reasoning and motorically, sometimes agents are able to achieve coordination
for joint action not by representing each others’ plans but
by treating each other's actions and their own as if they were parts of a single action.
This is the fundamental idea behind co-representation, as I see it.