insert-transcript#70eb7b02-78ef-44ea-a691-7812a4559220-here
some
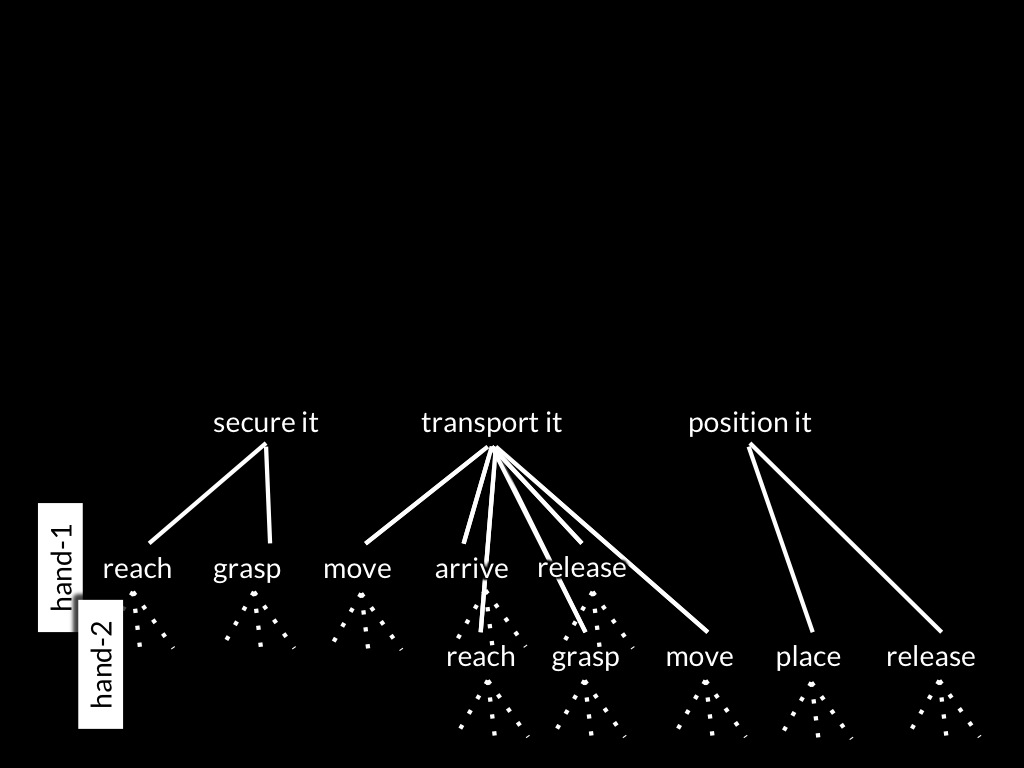
motor representations (/schema) represent ???outcomes = goals
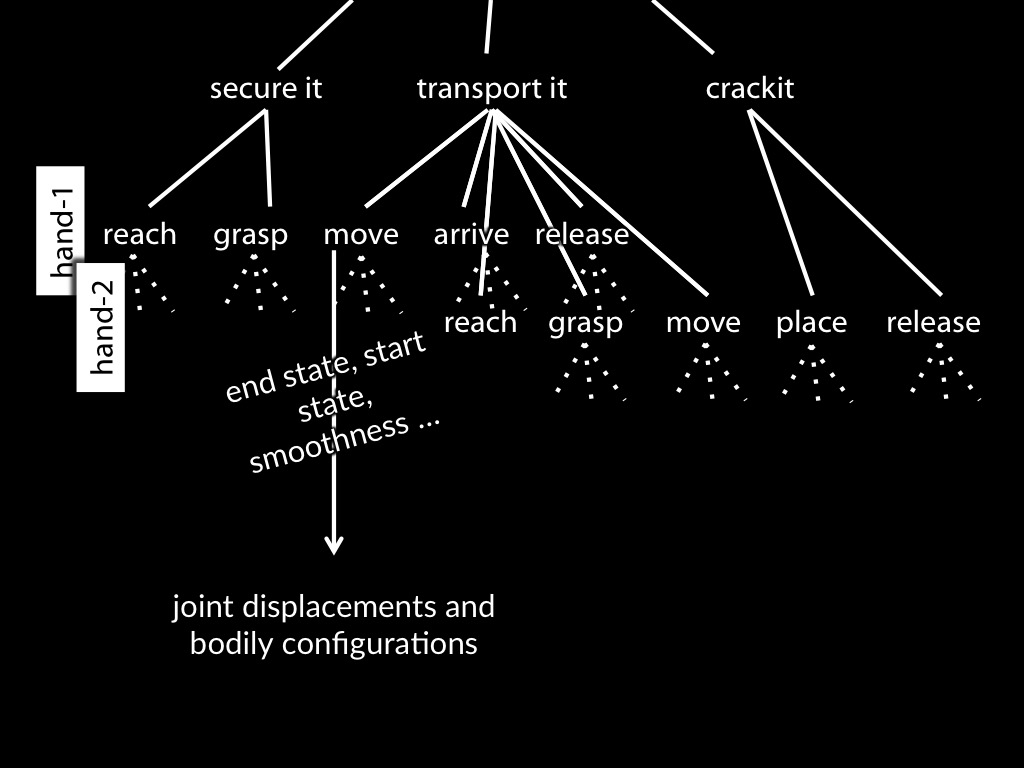
‘a given motor act may change both as a function of what motor act will follow it—a sign of
planning—and as a function of what motor act preceded it—a sign
of memory’ (Cohen & Rosenbaum, 2004, p. 294).
‘a given motor act may change ... as a function of what motor act will follow it—a sign of
planning’
Cohen & Rosenbaum 2004, p. 294
Let me go back and start with some almost uncontroversial facts about motor representations and
their action-coordinating role.
Why postulate motor representations at all? [Dependence of present actions on future actions
is one reason for doing so.]
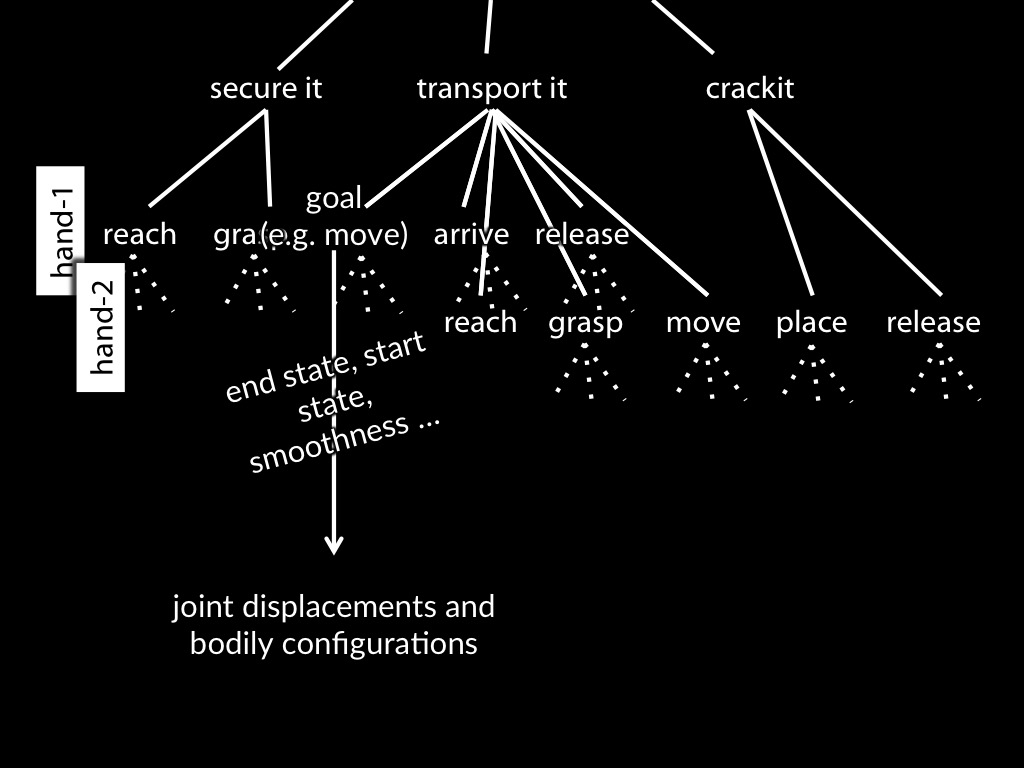
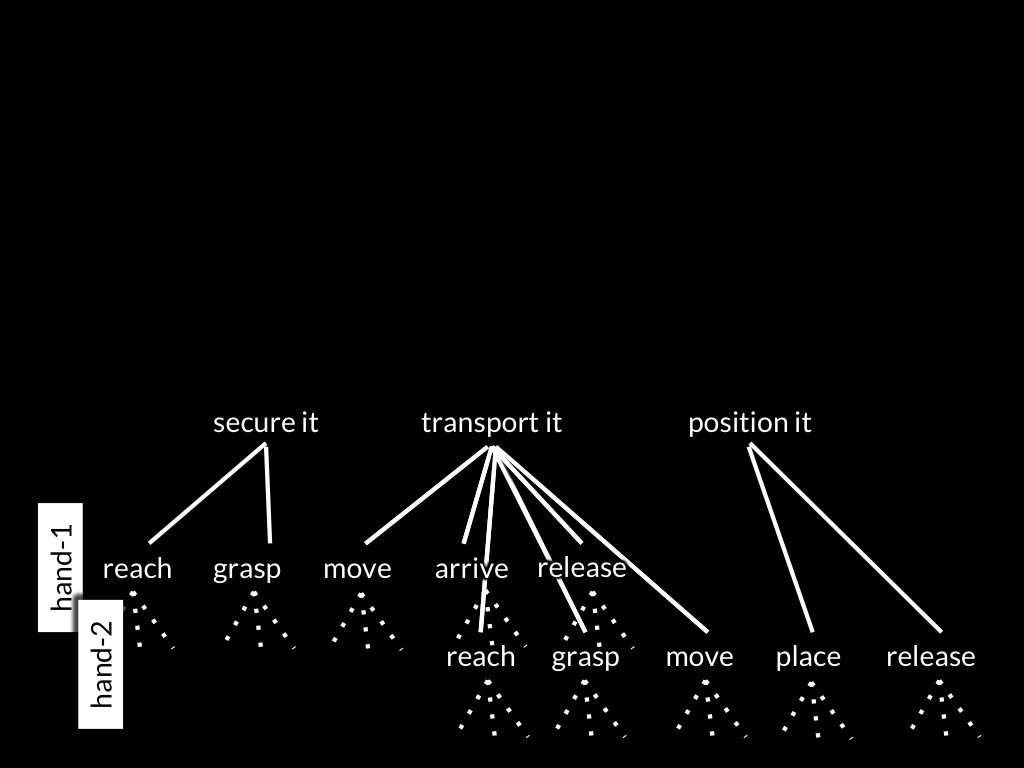
Suppose you are a cook who needs to take an egg from its box, crack it and put it (except for the
shell) into a bowl ready for beating into a carbonara sauce.
Even for such mundane, routine actions, the constraints on adequate performance can vary
significantly depending on subtle variations in context. For example, the position of a hot pan
may require altering the trajectory along which the egg is transported, or time pressures may mean
that the action must be performed unusually swiftly on this occasion.
Further, many of the constraints on performance involve relations between actions occurring at
different times.
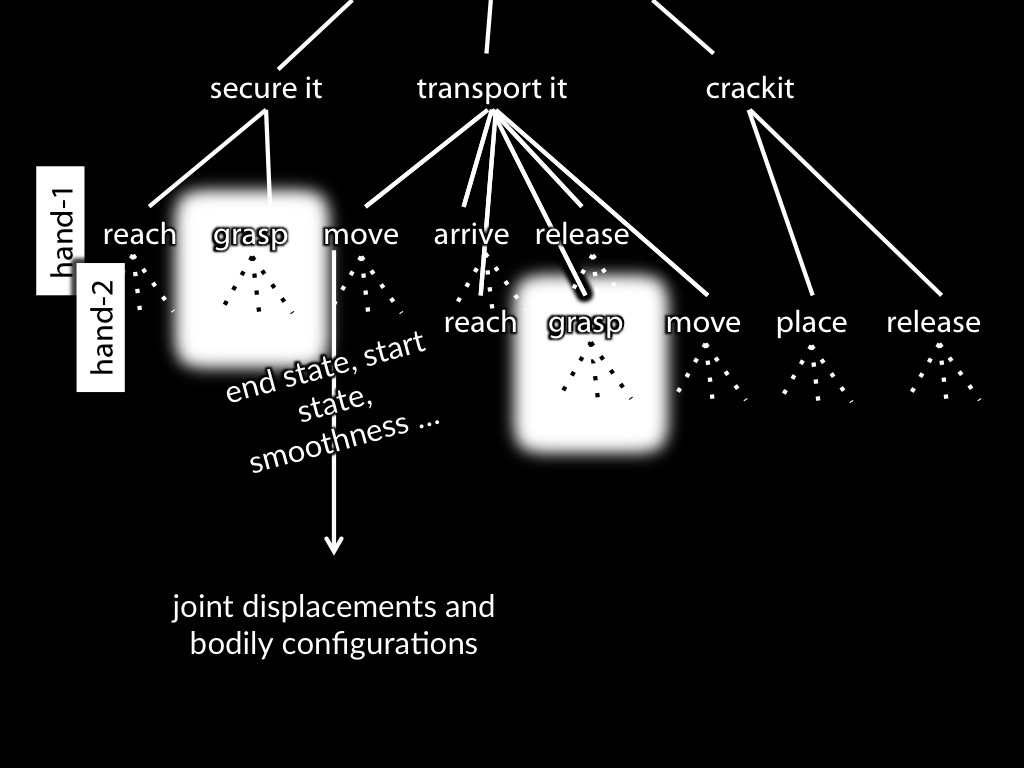
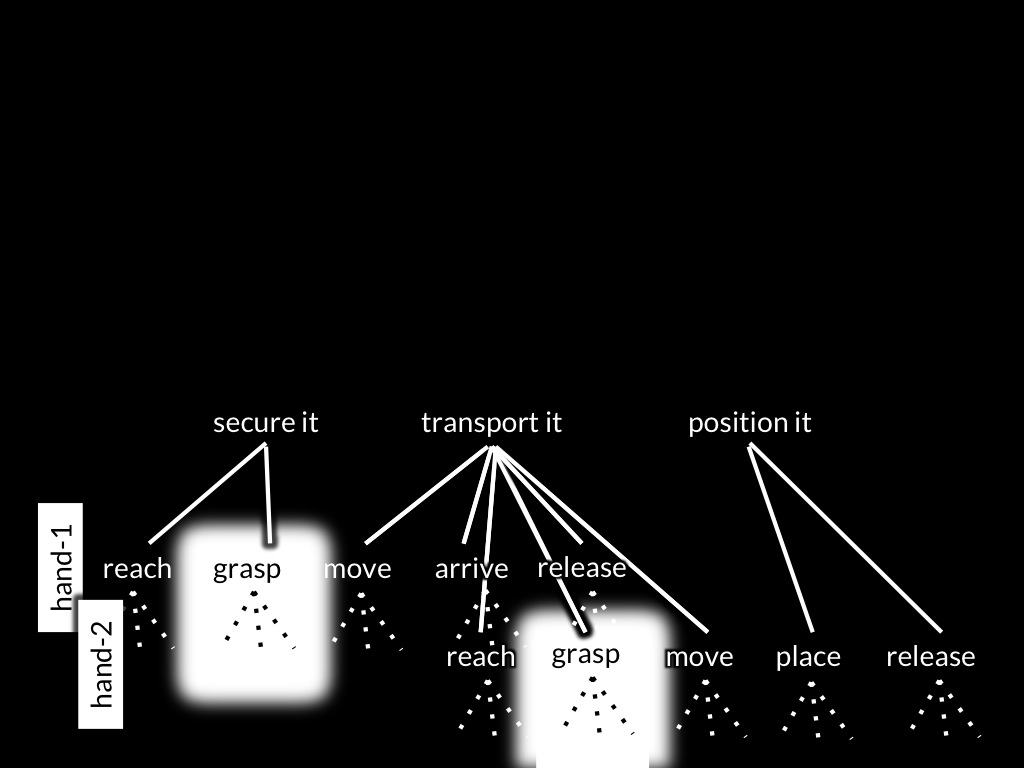
To illustrate, how tightly you need to grip the egg now depends, among other things, on the forces
to which you will subject the egg in lifting it later.
It turns out that people reliably grip objects such as eggs just tightly enough across a range of
conditions in which the optimal tightness of grip varies.
This indicates (along with much other evidence) that information about the cook’s anticipated
future hand and arm movements appropriately influences how tightly she initially grips the egg
(compare Kawato, 1999).
This anticipatory control of grasp,
like several other features of action performance (Rosenbaum, 2009, p. chapter 1 for more examples),
is not plausibly a consequence of mindless physiology, nor of intention and practical reasoning.
This is one reason for postulating motor representations, which characteristically play a role in
coordinating sequences of very small scale actions such as grasping an egg in order to lift it.
[The scale of an actual action can be defined in terms of means-end relations.
Given two actions which are related as means to ends by the processes and representations
involved in their performance, the first is smaller in scale than the second just if the
first is a means to the second. Generalising, we associate the scale of an actual action
with the depth of the hierarchy of outcomes that are related to it by the transitive closure
of the means-ends relation. Then, generalising further, a repeatable action (something that
different agents might do independently on several occasions) is associated with a scale
characteristic of the things people do when they perform that action. Given that actions
such as cooking a meal or painting a house count as small-scale actions, actions such as
grasping an egg or dipping a brush into a can of paint are very-small scale. Note that we
do not stipulate a tight link between the very small scale and the motoric. In some cases
intentions may play a role in coordinating sequences of very small scale purposive actions,
and in some cases motor representations may concern actions which are not very small scale.
The claim we wish to consider is only that, often enough, explaining the coordination of
sequences of very small scale actions appears to involve representations but not, or not
only, intentions. To a first approximation, \emph{motor representation} is a label for
such representations.]
‘a given motor act may change both as a function of what motor act will follow it—a sign of
planning—and as a function of what motor act preceded it—a sign
of memory’ (Cohen & Rosenbaum, 2004, p. 294).
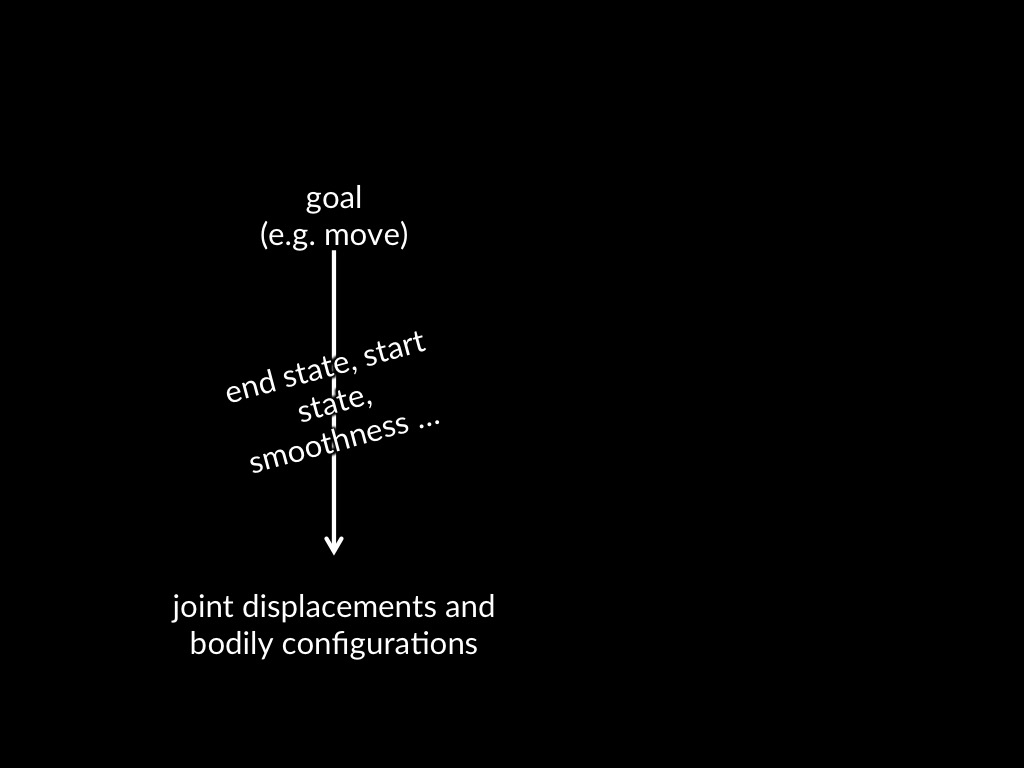
What do motor representations represent? An initially attractive, conservative
view would be that they represent bodily configurations and joint displacements,
or perhaps sequences of these, only.
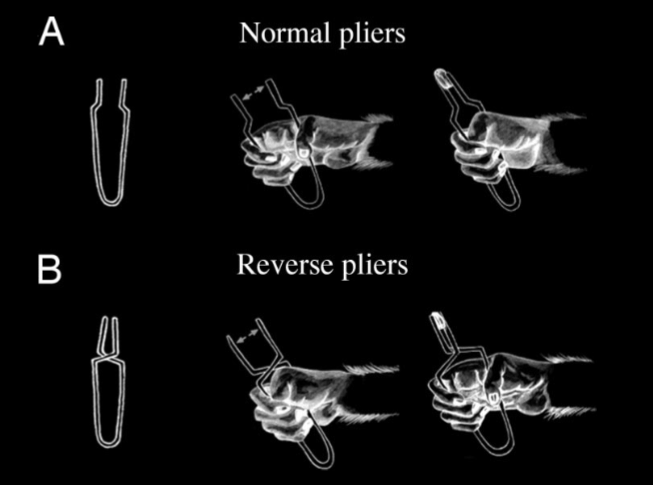
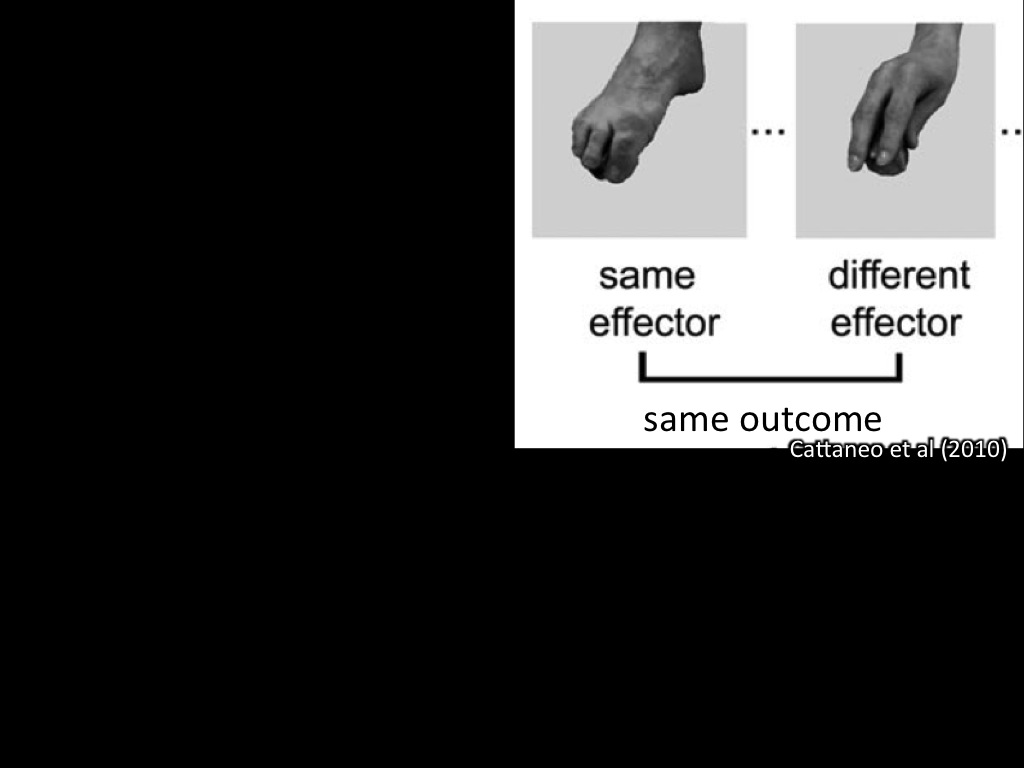
However there is now a significant body of evidence that some motor representations
do not specify particular sequences of bodily configurations and joint displacements,
but rather represent outcomes such as the grasping of an egg or the pressing of a switch.
These are outcomes which might, on different occasions, involve very different bodily
configurations and joint displacements
(see Rizzolatti & Sinigaglia, 2010 for a selective review).
Such outcomes are abstract relative to bodily configurations and joint displacements
in that there are many different ways of achieving them.